京都府精華町にある「けいはんなプラザ」にて、複数のロボットが同一空間で稼働する社会を見据えた実証実験が実施されました。
本実証は、一般社団法人京都スマートシティ推進協議会が受託し、デジタル庁「複数モビリティの分散協調運行基盤等の在り方に関する実証調査研究」の一環として実施されたものです。
異なるメーカー・異なる用途のロボット達が、同じ空間を共有しながら、安全かつ円滑に動き続けるための「分散協調運行」※の実装可能性を検証しました。
※分散協調運行は、信号機や交通ルールのように、ロボット同士が「今、進んでいいか」を共有しながら動く仕組みです。
当社は、本実証において、ロボット同士の位置情報を共通化する技術的な観点から、協調走行を一元管理できる座標変換システム、および時間の流れも含めた4次元時空間情報(空間ID)に関する空間情報とその属性管理に関する検証を支援いたしました。
これまでのロボット実証は、「一台のロボットが安全に走れるか?」、「サービスとしてきちんと成立するか?」と、いった点の確認が中心でした。
しかし、ロボットが当たり前に使われる社会を考えると、さまざまなロボットが同じ場所を共有しながら、ぶつかることなく、止まることなく動き続ける仕組みが欠かせません。
今回の実証では、実際の施設環境を舞台に、さまざまな制約がある中で、ロボット同士がどのように協調して動けるかを検証しました。
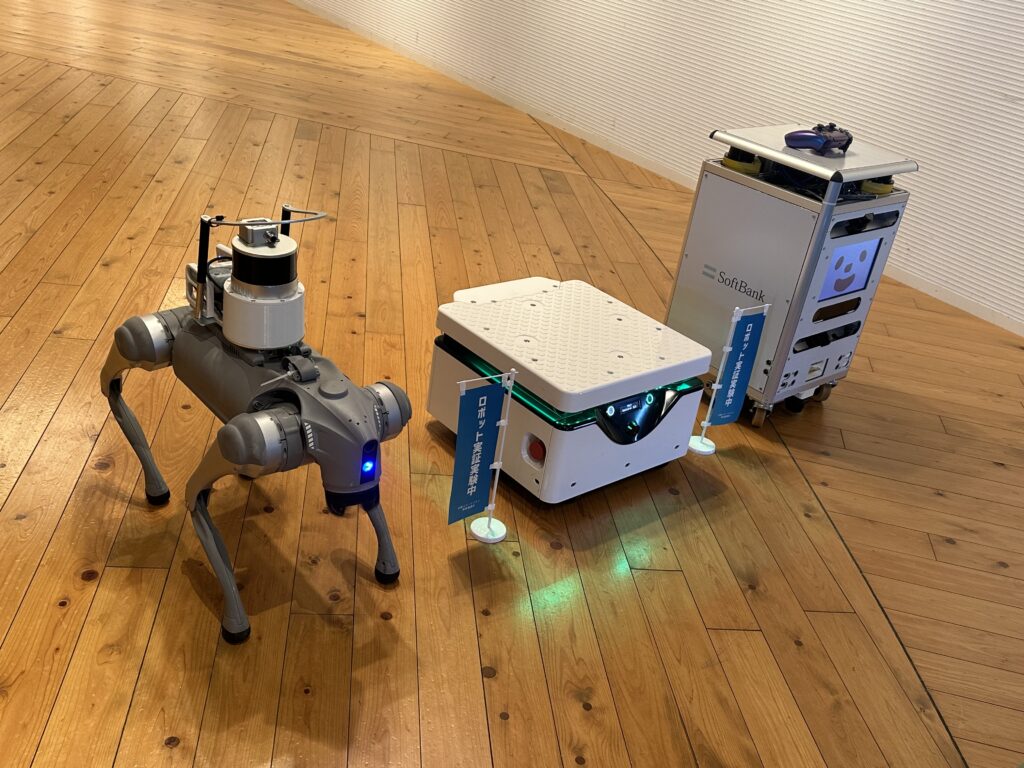
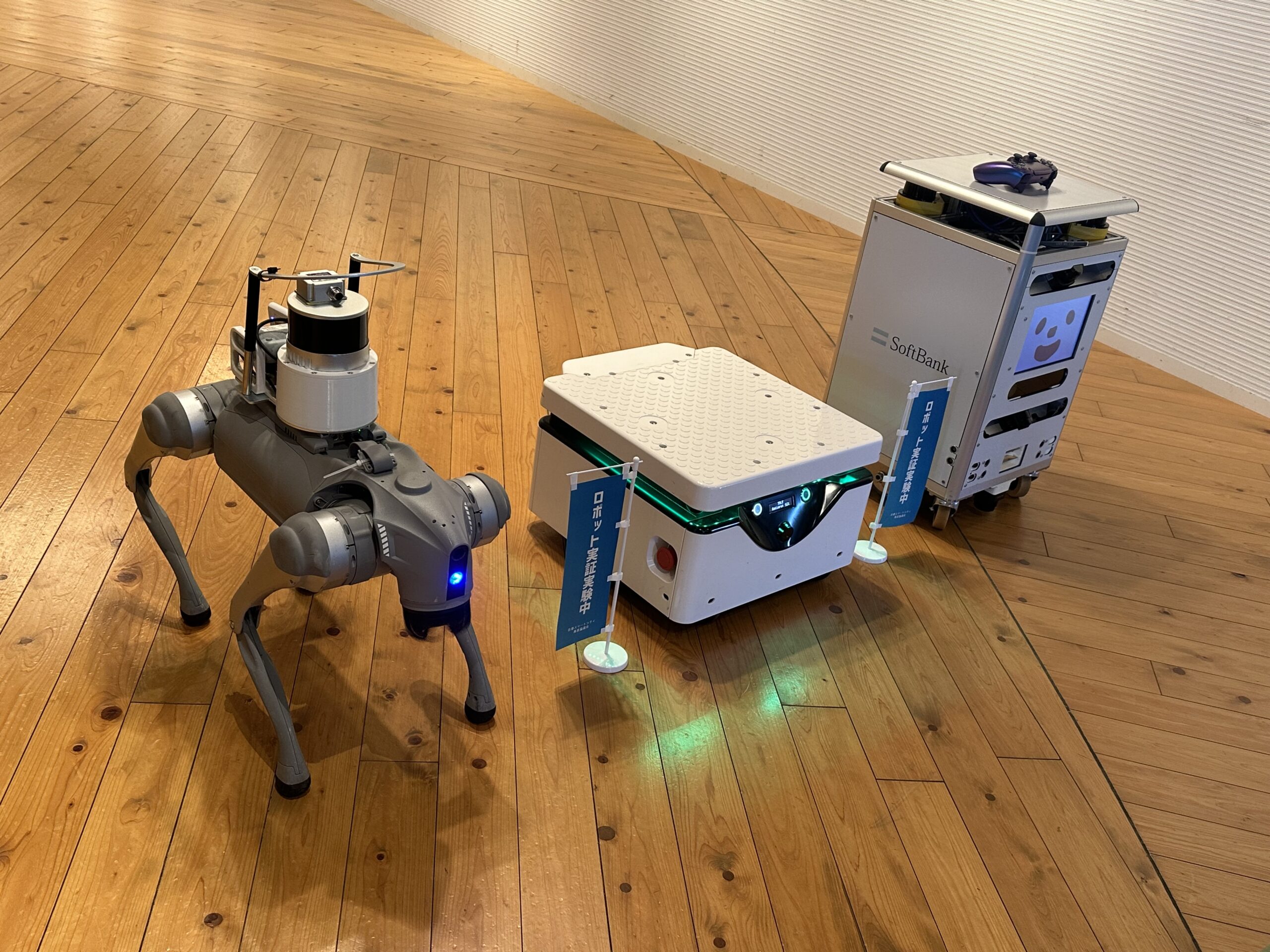
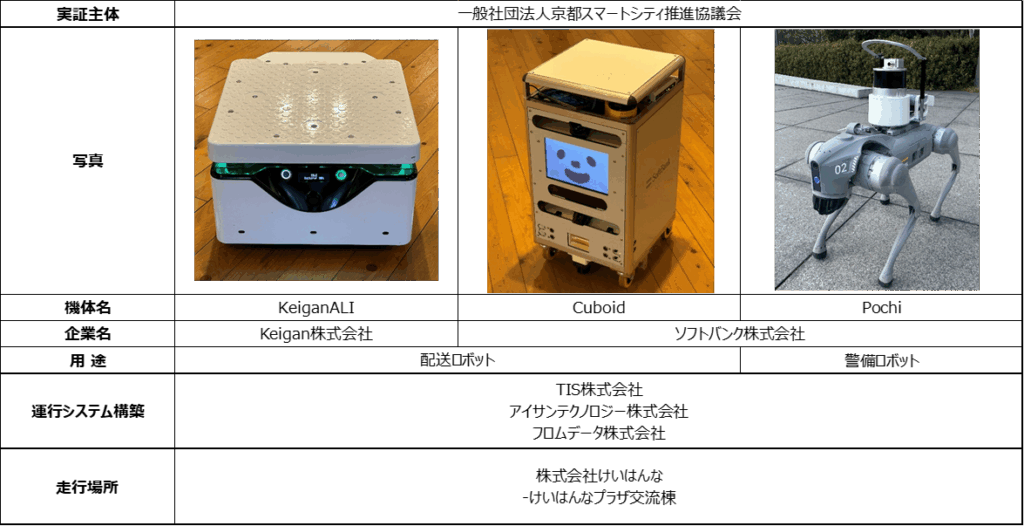
今回のロボット実証実験では、それぞれ異なる役割と個性を持つロボット達が活躍しました。
具体的には、狭い通路や屋内外が切り替わる場所、すれ違いが難しい空間に加え、人の動きや周囲の環境が複雑に関わるなど、実社会特有の条件を想定しています。
こうした環境の中で、ロボット単体の性能に頼るのではなく、ロボット同士やシステム間で情報を共有し、協調して動く仕組みの在り方を検討しました。
特に重要なのは、メーカーの違いに関係なく、共通のルールのもとで空間を使い、クラウド上の分散協調運行基盤を通じて、ロボットが「今、通ってよいか」を判断・調整する仕組みを、実環境で確認している点です。
これにより、特定の事業者に依存しない、誰もが参加しやすいロボットサービスの展開につながる可能性を示しています。

2台のロボットがすれ違いをする実証シナリオの様子です。
また本実証は、単なる安全性の確認にとどまらず、回送を含めた実運用やフードデリバリーなどのサービス成立性、さらに運行が継続するための仕組みについて、ハード・ソフトの両面から評価を行いました。
現地視察を通じて、事業化や社会実装を見据えた重要な取り組みであると感じました。
なお、2月2日には鈴木一弥京都府副知事による現地視察も行われるなど、関心の高いものとなりました。

ロボットの前方に人が立つと自動で判断し停止する様子を、実際に体感し、感心されていました。

2月2日の様子はこちら
こうした取り組みを通じて、人手不足やサービス維持が課題となる施設環境において、ロボットが「当たり前に動き続ける社会」を実現するための、実証知見の蓄積が進められています。
【実証概要】
けいはんな学研都市地区での実証実験
建物内外での複数用途・複数メーカーのロボットの協調による走行デモを通じ、安全性の評価や課題抽出・検証、メーカー向けガイドライン案へのフィードバック等を行った。
実証内容:用途の異なるサービスロボットを、建物施設屋内外の走行の難所となる箇所
(渡り廊下、自動扉、屋外スロープなど)で走行させ、安全性(システムの有用性)を検証した。
実証期間:令和8年2月2日(月)~3日(火)
◾️現地取材レポート
2026年2月3日(火)に現地で取材した内容をレポートいたします!
京都府精華町にあるけいはんなプラザの敷地内には、太陽の光で時を刻む世界最大の「日時計」が設置されていました。最先端の研究が集まるこの場所に佇むアナログな存在が印象的でした。

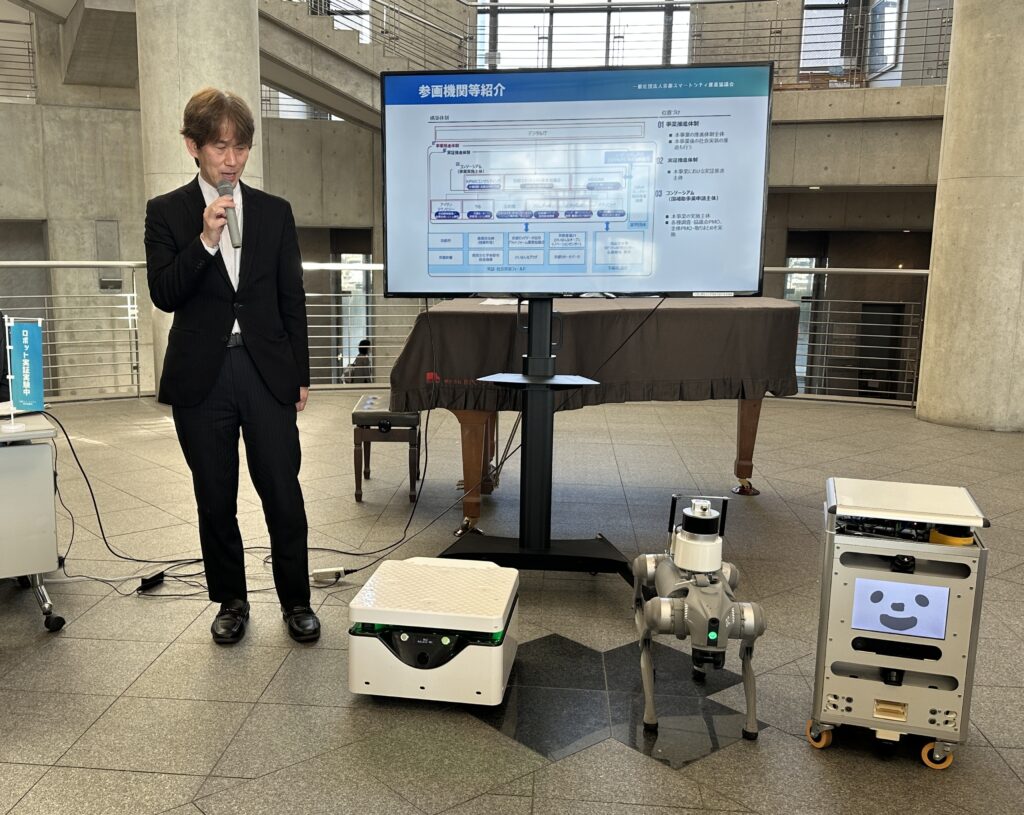
当日は記者および参加者向けの挨拶を皮切りに、実証の概要説明、各ロボットの紹介、質疑応答を通じた意見交換が行われました。
当社からも、実証全体の中での役割や取り組み内容についてご説明をさせていただきました。
3台のロボットは、当社が提供するシステムを利用することで、現在の位置だけでなく、その場所に紐づく属性情報(待機エリア、進行エリア、進入禁止エリア)を共通の形式で取得することができます。
現地では、屋内外をまたいで移動するロボットの動きや、複数のロボットが同時に稼働する様子を実際に確認することができ、実運用を見据えた検証であることを改めて実感しました。

想定した検証シナリオに基づき、走行を行いました。複数ロボットが同時に稼働する環境では、建物側のバリアフリー対応が一つの重要な課題であるとの声も聞かれました。

屋外動画では、四足歩行の警備ロボット「Pochi」と荷物搬送ロボット「KeiganALI」が互いの存在を認識し、経路を阻害することなく協調して走行する様子を確認できました。
屋外での協調走行の様子
警備ロボットと搬送ロボットの連携
屋内外をまたぐ走行デモ
各ロボットは、それぞれのメーカーによってあらかじめ自律走行できるようにプログラムされています。
必要に応じて、上位の運行管理システムから指示を受け取り、通信を通じて動作を調整しました。この上位システムのルールに従うことで、メーカーや機種が異なるロボット同士であっても、同じ空間の中で互いにぶつかることなく協調して走行することが可能となります。
例えば、すでに別のロボットが通路を使用している場合には、後続のロボットに対して「ここで待機してください」といった指示が送られます。システムは、どのロボットが、いつ、どの空間を使っているのか、そして次にどのロボットが使おうとしているのかを常に把握しています。

「KeiganALI」が停止している「Cuboid」を避けて進行する実証シナリオの様子です。
メーカーに依存せず、共通のルールとして空間利用を調整する仕組みを標準化しようとしている点は、今回の検証の大きな特徴であり、ロボットではなく「空間そのものを制御する」という発想が非常に印象的でした。
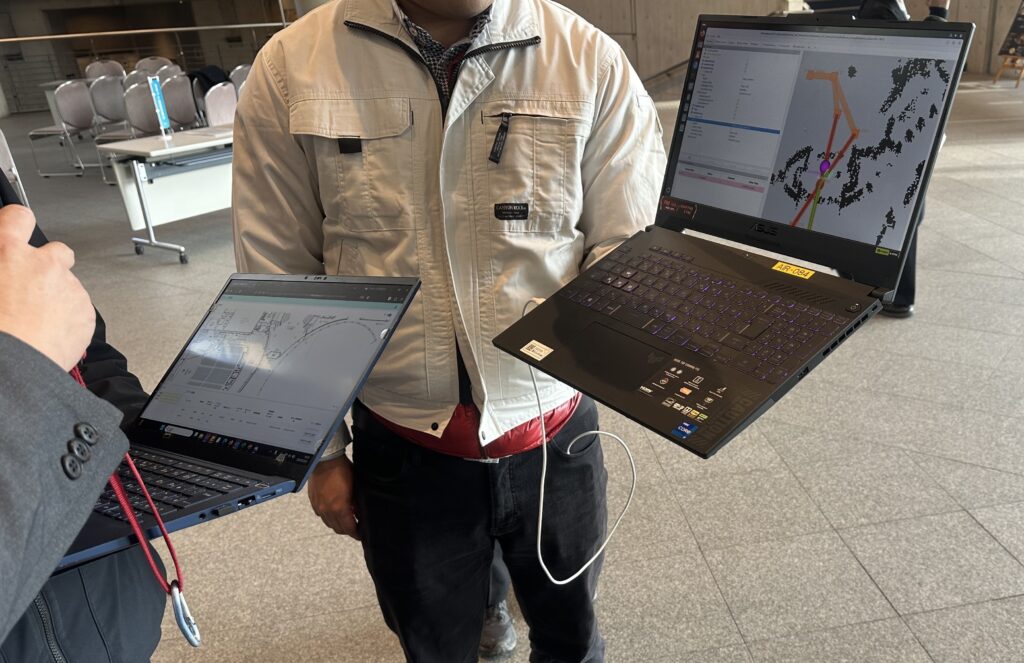
それぞれのメーカー担当者が画面を見せ合いながら打ち合わせを行っています。同じ場所を扱っていても、表示される地図の見え方はそれぞれ異なります。
一方で、本実証では、用途やメーカーの異なる複数のサービスロボットが、建物の内外をまたいで安全に走行することが求められました。しかし、各ロボットはそれぞれ異なる方法で位置情報を管理しており、そのままでは位置を正確に共有・調整することが難しいという課題がありました。
そこで当社は、分散協調型の運行管理システムにおいて、4次元時空間情報基盤(空間ID)を活用し、位置情報を共通の形式で扱えるようにする観点から本実証を支援しました。
具体的には、空間を立体的な小さな区画(ボクセル)として分割し、それぞれに固有のIDを付与することで、メーカーや仕様の違いを超えて位置情報を統一的にシステムが管理しました。
これにより、異なるロボット同士であっても、「どのロボットが、いつ、どの空間にいるのか」を共通の基準で把握することが可能となりました。
さらに、空間IDには属性情報を付与することで、単なる座標ではなく、「当該エリアの走行可否等、どのエリアがどのような状況にあるのか」といったより直感的な空間単位での認識も可能となります。
このような空間情報は、都市OS、ビルOSなどの幅広いシステムで利活用することが可能となります。
当社は本実証を通じて、多様なロボットやサービスが共存する将来社会に向けた、柔軟で拡張性の高い運行管理基盤の確立を目指しており、今後のさまざまなユースケース展開につながる基盤技術としての発展を見据えています。
「KeiganALI」と「Pochi」の実証外での一コマ
(なお、警備ロボットの名称が「Pochi」であることについて担当者の方に伺うと、「安易な名前なんですが……」と笑いながら教えてくださいました。)
【関連メディア情報】
2026年02/06 讀賣新聞オンライン
配送するロボ 警備するロボ けいはんなで動作検証
https://www.yomiuri.co.jp/local/kyoto/news/20260205-GYTNT00048/
【関連情報】
2025年03月31日
“異なる位置情報を、ひとつに” アイサンテクノロジー、空間ID対応アプリケーションの提供を本格化 〜国土交通省「GeoSynergy Linkage Hub」ラボ認定を取得〜
プレスリリースはこちら
4次元時空間情報基盤に関する取り組みの詳細はこちら
2026年01月26日 京都スマートシティ推進協議会
【報道発表】複数のロボットと各種サービスを連動させるための実証研究