
当社は、様々な交通課題の解決に寄与することが期待されている自動運転サービスの実現を目指し、国の規制緩和の動きに連動した最先端の遠隔型自動運転システムを含む実証実験を、全国に先駆けて積み重ね、自動運転技術の向上と共に、ビジネスモデルの構築や社会的受容性の醸成を図ってまいりました。
本年度は、実運行において交通事業者等により再現可能なビジネスモデルの完成度をさらに高めることを目指し、エヌ・ティ・ティ・コミュニケーションズ株式会社(本社:東京都千代田区、代表取締役社長:丸岡 亨)を幹事会社とし、株式会社ティアフォー(本社:愛知県名古屋市、代表取締役社長:加藤 真平)、岡谷鋼機株式会社(本社:愛知県名古屋市、取締役社長:岡谷 健広)、損害保険ジャパン株式会社(本社:東京都新宿区、代表取締役社長:白川 儀一)と共に、5社の共同体で愛知県より委託を受け事業実施いたしました。
この実証実験の一環として、モリコロパーク(愛・地球博記念公園)園内管理道路において、障害物および路上停車車両の自動回避の検証を実施しました。また、技術検証以外にも、実際の自動運転バスの運用を想定し、園内を走行する他車両との走行ルールの策定に向けた検討、および緊急時の対応シミュレーションを行いました。
2023年10月24日(火)から10月26日(木)まで 計3日間
| 実証地域等 | 愛知県長久手市 モリコロパークの外周園路(愛・地球博記念公園) https://www.aichi-koen.com/moricoro/ |
| 道路種別 | 閉鎖空間 |
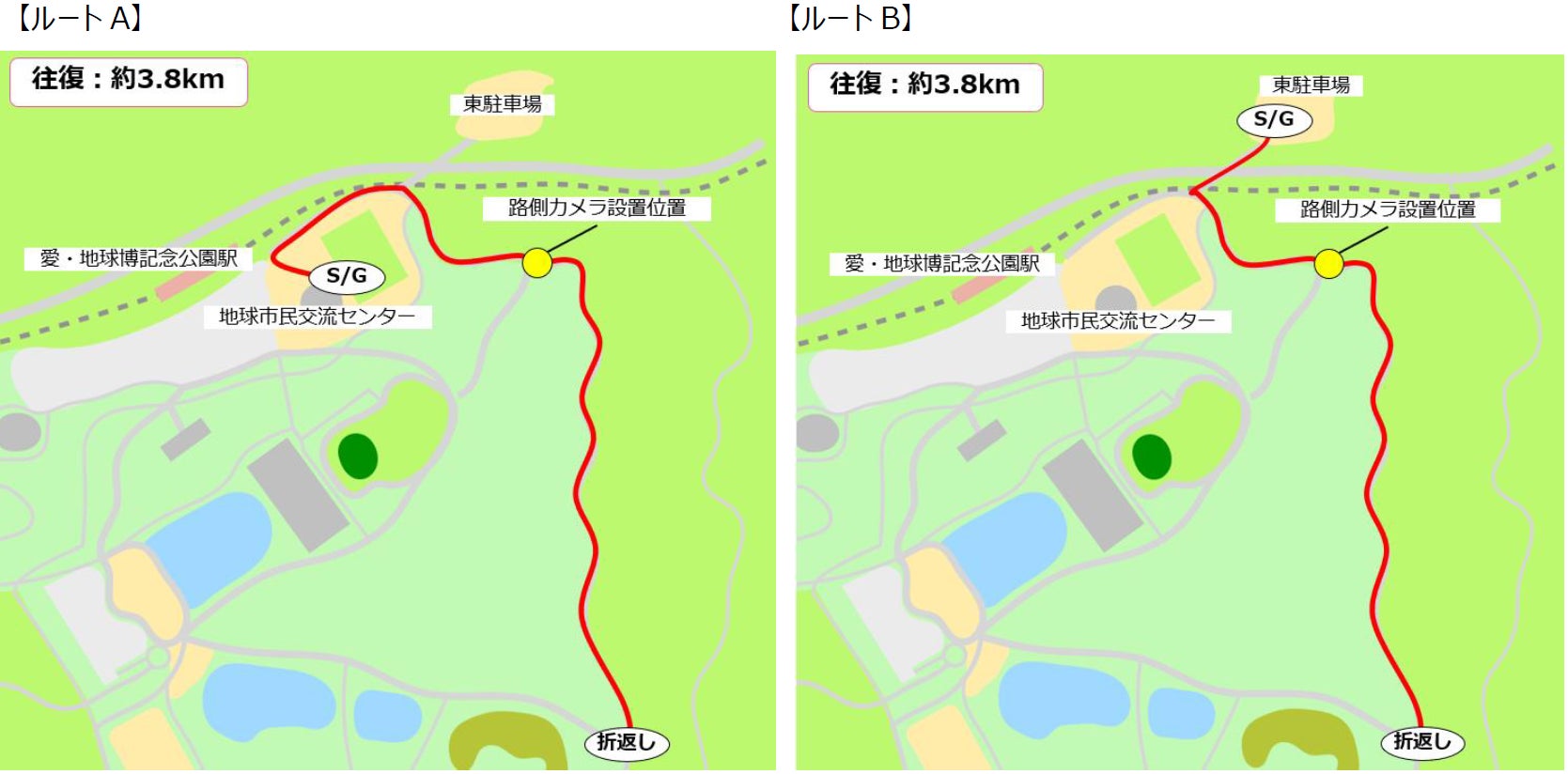
ルート詳細(S:出発点/G:終着点)
2 使用車両(1台)

3 事業実施体制
エヌ・ティ・ティ・コミュニケーションズを幹事会社とする共同体で事業実施

4 実証実験の特徴
「将来の無人自動走行に向けた検証」をテーマとした検証
(1)自然環境等に対応した自動走行技術の向上
無人自動走行を実現するためには、様々に変化する道路環境を車両が自動で認知・判断し走行を継続出来ることが必要となります。本実証実験では、走行ルート上に園内管理道路において想定される以下の障害物を設置し、車載センサーで検知し、自動で回避できるか検証しました。自動回避における課題を抽出することで、自動走行技術の磨き上げを図りました。
1 小型障害物
園内特有の自然落下物(木の枝)や矢印看板を障害物として設置し、起伏のある道路環境下において、路面の傾斜と小型障害物を区別して自動で回避することを検証しました。また、複数の形状や角度で障害物を設置することで、検知における課題の洗い出しをおこないました。
2 停車車両
管理用車両を模した車両を路肩に停車し、対向車の有無を自動で検知させ、安全に停車車両を回避できることを検証しました。
(2)遠隔管制※2システムや路側カメラとの連携
無人自動走行の実現によって車内に運転手や乗務員が不在となるため、遠隔管制室で配車指示や車内の状況を把握することが必要になります。ルートと配車時間を遠隔管制室から設定しダイヤ通りに運行することを検証するとともに、起伏や樹木が多く電波環境が悪い条件下において円滑に音声や映像の通信をするための課題の洗い出しをしました。
加えて、走行ルート上に設置した複数の路側カメラおよび車載カメラの映像を遠隔監視室へ伝送することで、ルート上の異常を検知します。異常が検知された場合は、車両へ直ちに伝達し走行に反映することで、安全な運行を実現しました。
(3)園内での自動運転バスの走行ルールや緊急時の対応オペレーションの検討
無人自動走行により運転手が不在になることで、園内運行ルールに則った走行や、緊急時の対応といった運転手が担っていたオペレーションを自動運転車両が自ら判断し実施することが必要となります。それに先立ち、自動運転車両の判断の基準となる走行ルールや緊急時の対応方法を検討しました。
具体的には、管理道路や園内バスルートそれぞれについて、乗客の安全性や快適性を考慮した走行の優先順位を検討し、他車と協調した走行を自動運転システムの挙動に反映することを検討しました。また、緊急時のオペレーションとして、車両内で異常事態(急病人等)が発生した場合を想定し、車内の乗客への適切な対応方法を検討しました。
(4) 3Dマップ方式による安定した自動走行の検証
衛星電波を用いない3Dマップ方式のみを用いた走行を行うことで、電波環境の悪い条件下での走行安定性を検証しました。また、自動運転車を導入する際の課題の1つとなるランニングコストの低減を目指し、過去に取得した3Dマップデータを流用し、必要最小限のマップ更新で安定した走行ができるか検証しました。
用語説明・補足
| ※1 Autoware | 自動運転システム用オープンソースソフトウェア The Autoware Foundationの登録商標 |
| ※2 遠隔管制 | 自動運転車両の運行を遠隔からの映像をもとに管理・制御すること |
それでは2023年10月24日(火)当日の様子をお知らせします!
実証実験は、2005年に開催された愛知万博(愛・地球博)長久手会場の跡地に開設された愛・地球博記念公園(モリコロパーク)で実施されました。

実験では、EVバスが運転手のハンドルなどの操作なしに公園内の約3・8キロを走行しました。
加えて、森などの衛星電波が入りにくい環境で、事前に読み込んだ3Dマップのデータを使って
搭載したセンサーが木の枝や路肩に止まっている車を検知し、自動でよけたり、止まったりする技術検証を行いました。

愛知県の大村秀章知事が現地を視察されました。

試乗後の記念撮影および、囲み取材の様子です。
大村知事は「森の中でカーブがあっても、大変スムーズに乗れた」と述べられました。

走行風景(外観)運転席無人
走行風景(車両内)運転席無人
木の枝回避