Solutions
移動体の自己位置を
高精度化したい
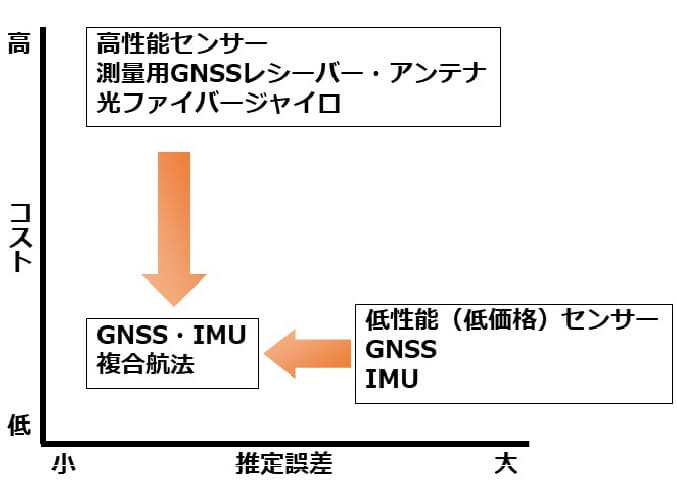
GNSSとIMUの複合航法
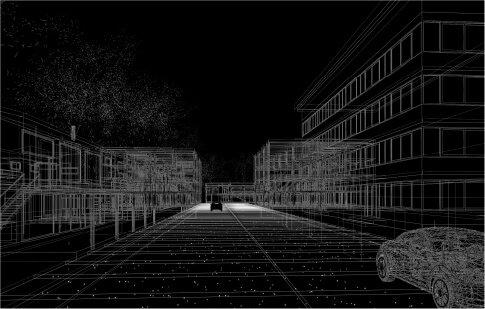
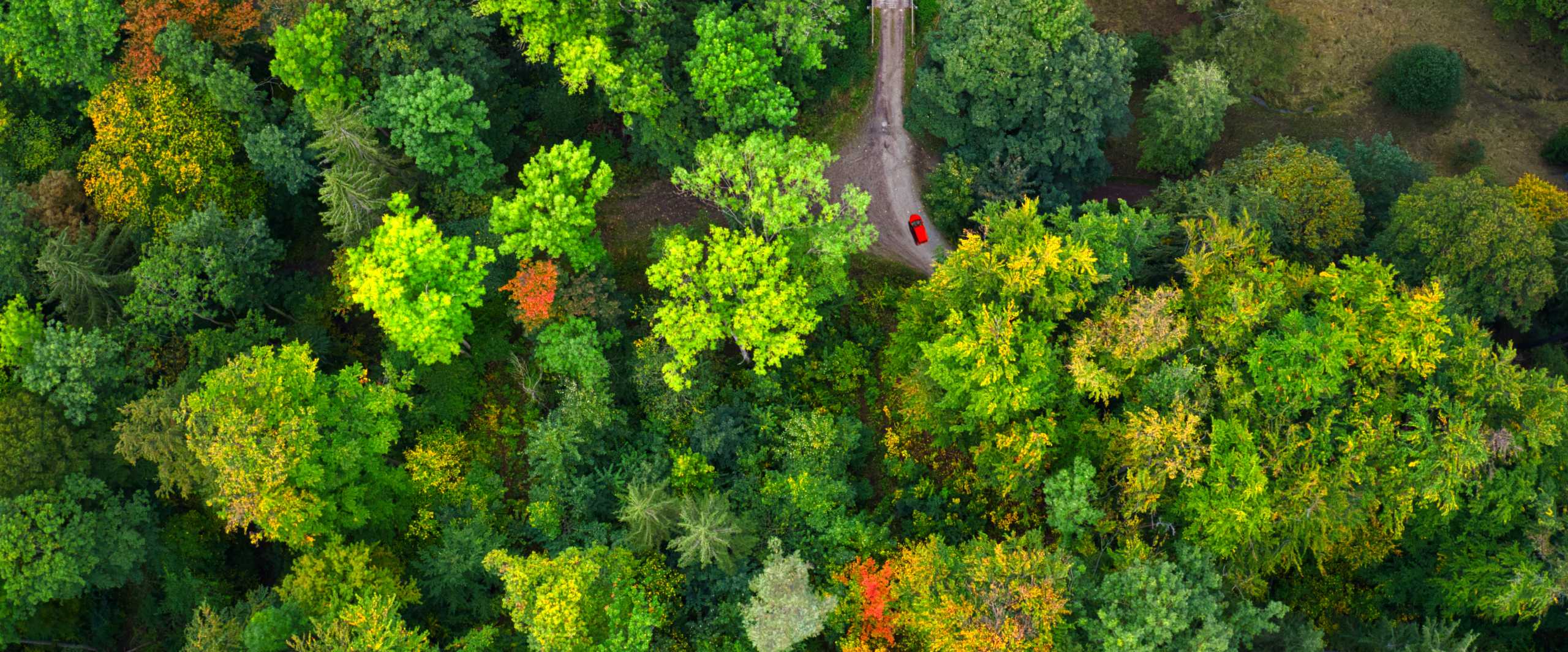
自動運転車両で自己位置推定するためのセンサーにはLiDAR、GNSS、カメラなどの選択肢があり、走行環境により、自己位置推定をどういった手法で行うかが、重要になっています。
自己位置推定に用いられていたGNSSとIMUを用いた複合航法システムでは、車線内に収まるレベルの精度が求められ、その精度は価格に依存していました。
当社では、低コストなセンサーを活用し、高精度な位置推定を実現できる技術をご提案いたします。
高精度航法演算システム

GNSS/IMUを活用した、車両向け高精度位置推定システム
-
特徴
ローコストなセンサで動作
レーンレベルの位置推定
ROS上でリアルタイム動作 -
機能
GNSS Dopplerを活用した高精度車両軌跡推定
GNSS/IMUを用いた絶対位置推定
ジャイロ誤差推定
車速誤差推定